智驾系统就是通过利用传感器组合完成对周遭世界的感知,进而实现一系列驾驶操作的系统。随着智驾的发展,自动驾驶的等级也在不断提高,所需要毫米波雷达的个数和质量也在提升。
智驾系统就是通过利用传感器组合完成对周遭世界的感知,进而实现一系列驾驶操作的系统。随着智驾的发展,自动驾驶的等级也在不断提高,所需要毫米波雷达的个数和质量也在提升。
木牛科技研发总监苏轶伦表示,木牛针对L2级以上ADAS系统提供两套5R方案,其中高性价比版是前向雷达x1 + 角雷达x4;而高性能版是4D成像雷达x1+角雷达x4。无论哪一种方案,都能提供点云层级、目标层级、功能层级的信号输出,同时,木牛还可以提供5R点云融合的完整软件服务。

苏轶伦 | 木牛科技研发总监
同时他介绍,木牛科技通过打造“木牛Radar OS”高清4D点云技术架构,突破传统雷达技术在分辨精准度和规模部署成本上的局限性,将高性价比的雷达应用到车载、航空、智能和体育四大领域。
以下为演讲内容整理:
智能驾驶浪潮正是汹涌澎湃的时候,而且还在持续高速发展。
智驾系统是通过传感器组合完成对周遭世界的感知,进而实现一系列驾驶操作的系统。随着智驾的发展,自动驾驶的等级也在不断提高,所需要的传感器从种类和数量上都在不断提升,对毫米波雷达的数量和信号质量需求也在提升。
智能驾驶浪潮下的毫米波雷达
如今,对于智驾系统应该使用多传感器组合的事情,大家基本已经达成共识。由于自身性能限制以及特斯拉效应等,曾经行业内对于传统毫米波雷达的应用存在一定的疑问。但是随着4D成像雷达的快速发展,逐渐补足了传统毫米波雷达的不足之处,再加上特斯拉也重新回到了毫米波雷达的战线上,时至今日,类似的疑惑已经不复存在。
并且随着4D成像雷达的快速发展,毫米波雷达在多传感器当中的地位也会持续提升。
在这个大背景下,木牛也在快速发展。在智驾不同等级当中,木牛针对L0-L2级ADAS场景提供前雷达和角雷达两种产品,不仅可以实现目标层级和预警功能信号的输出,也支持点云输出与融合跟踪输出;针对L2级以上ADAS系统提供两套5R方案,其中高性价比版是前向雷达x1 + 角雷达x4;而高性能版是4D成像雷达x1+角雷达x4。无论哪一种方案,都能提供点云层级、目标层级、功能层级的信号输出,同时,木牛还可以提供5R点云融合的完整软件服务,助力客户和主机厂快速实现落地,获得更好的感知质量。
在产品研发和项目量产的过程当中,木牛也遇到了一些对毫米波雷达来说比较难以解决或比较容易出问题的场景,这里简单分享几个场景。
解决雷达痛点场景
图源:嘉宾演讲材料
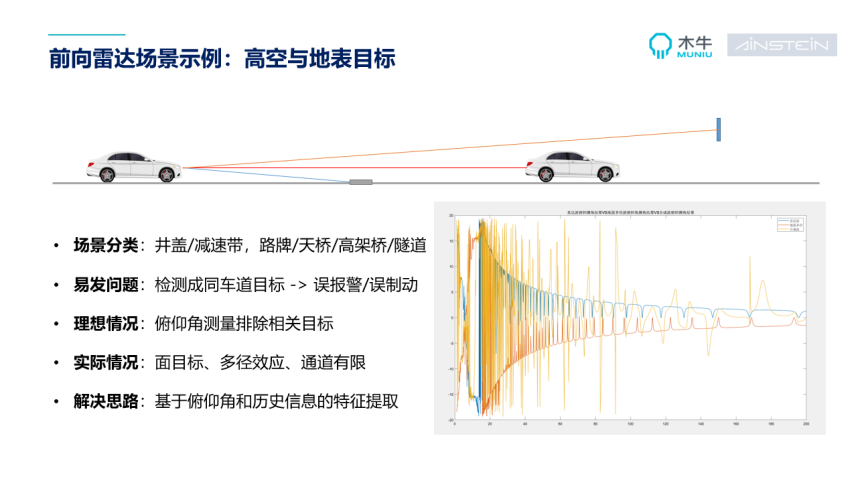
第一个场景是在前向雷达应用当中常见的高空和地表目标场景。高空和地面目标往往也会被雷达检测到,此时如果不能识别出来,可能会导致后端融合层产生假目标进而导致误报警或误刹车。理想化的解决方法是通过测量目标的俯仰角进行过滤。但是实际情况是,对于传统前雷达来说,其天线通道数有限,往往不足以测准俯仰角。同时,由于目标往往是面目标,且存在多径效应,俯仰角是很难测准的。实际上,哪怕是理论仿真的情况下,俯仰测角的波动性也很大。通过对高空目标、地表目标和正前方目标做仿真分析,我们会发现它们的信号分布存在很明显特征差异,在处理的过程中利用这些差异,并结合不同目标在跟踪过程中的历史信息,可以有效地识别出垂向的目标。做了这样的优化之后,木牛的前雷达无论对路牌、高架桥、隧道、还是井盖,都能够有效地进行区分。
对于前雷达,还有很多场景容易出现问题。比如在红绿灯启停转换场景,在ACC的过程当中,前方车辆遇到红灯并由运动转为静止,绿灯后再由静止转为运动,在这个过程当中可能出现航迹ID切换,这会导致融合的航迹中断或是出现假目标。针对改场景,木牛在提升雷达底层的分辨能力的同时,在跟踪策略上也做了优化,保证目标航迹不中断。再比如拥堵场景,由于车辆目标多且彼此差异小,会产生比较复杂的反射情况,毫米波雷达有可能会多次反射导致假目标,或是因为多径耦合导致测角不准,亦或是目标难分辨导致漏检,木牛通过复合波形设计提升分辨力,帧间累积剔除多径干扰,并通过场景识别过滤反射目标,实现在拥堵场景下,依然能对相邻3个车道的车进行稳定、准确的跟踪。
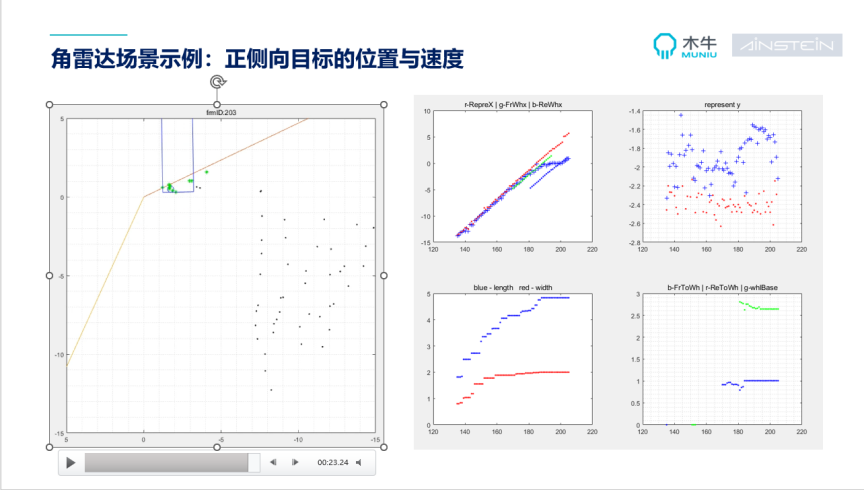
再举一个角雷达应用中常见的场景。由于雷达FOV有限,当目标车经过主车时,雷达只能检测到目标车的局部位置,使用传统的聚类方式,雷达输出的目标位置和速度信息可能是产生偏差;同时,由于目标车在侧面时其速度的径向分量接近0,雷达据此估计的速度也接近于0。针对该场景问题,在提升近处分辨力的同时,可以利用目标的微多普勒特性估计真实车速,同时通过角点估计和车轮识别,估计车身的长宽、前后弦长度、轴距等等。做完这一切后,就能够稳定估计目标出车头位置,同时还能利用这些信息进行目标分类。
图源:嘉宾演讲材料
木牛4D成像雷达
4D成像雷达,4D就是要具备俯仰向测角和分辨的能力,成像就是雷达需要具有更高的分辨能力,无论是在速度、距离还是角度维度。
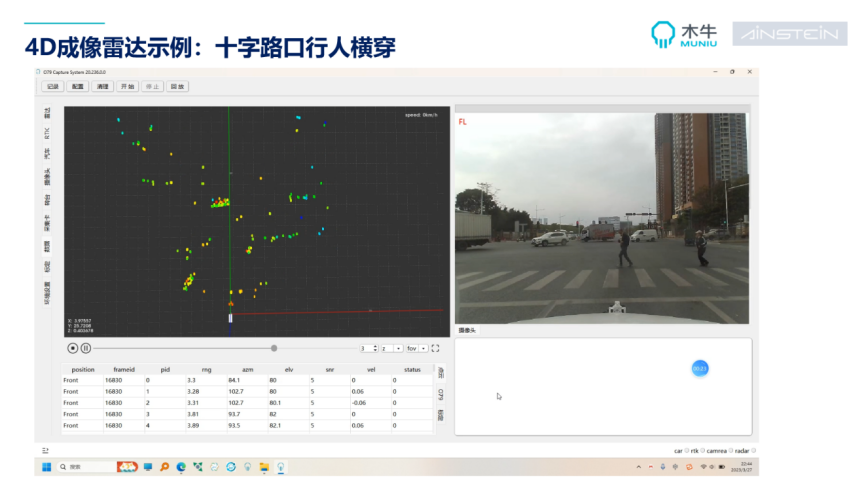
以木牛2019年推出的目前已经在北美量产的一款用于低速自动驾驶场景的成像雷达为例,可以看到4D雷达能够很好地区分出地面目标和高空目标,比如天桥、龙门架、加油站、路牌等,同时可以对道路边沿做出非常清晰的估计;在十字路口场景下,可以判断出横穿物体轮廓,包括两轮电动车、卡车,对于并排横穿的行人,也能进行稳定的检测与分辨。
图源:嘉宾演讲材料
木牛的2片级联4D成像毫米波雷达I79-48,作用距离可达到250米,角度分辨率实现2°。2°代表的是真实的波束宽度,如果使用超分辨算法,可以达到更高的分辨力。木牛的4片级联4D成像毫米波雷达方案,作用距离可达到350米,角度分辨做到1°以内,俯仰角度分辨做到1.2°。
总结
木牛科技成立于2015年,始终专注在毫米波雷达技术创新及其在无人系统、智能系统中的应用。通过打造“木牛Radar OS”高清4D点云技术架构,突破传统雷达技术在分辨精准度和规模部署成本上的局限性,将高性价比的雷达应用到车载、航空、智能和体育四大领域。
木牛深耕高分辨毫米波雷达技术,从最底层的系统架构设计、硬件设计、算法,包括整个研发过程当中一系列自研工具和系统都是自主开发生产,同时也做了很多数据积累,以期形成更好的技术能力。非常期待未来能和各位同仁一起合作,把智能驾驶的事业做的更好。