切换行业
切换行业

2023年3月31日-4月2日,中国电动汽车百人会论坛(2023)在京举行。同济大学教授、汽车学院副院长熊璐在3月31日下午举办的“第三届双智论坛上”发表了题为《智能驾驶汽车测试与评价》的主旨演讲。以下文字根据此次演讲内容整理,未经本人审核。

同济大学教授、汽车学院副院长 熊璐
今天我主要是从车的角度讲,即车路云,车路云连起来之后才能叫车路协同。我们所有的车路协同也好、智能网联也好,最后落到载体上都是车。车的方面,其实也存在非常多的瓶颈问题。今天我要分享的是“智能驾驶汽车测试与评价”的关键问题。
1
智能驾驶技术应用现状
看一下我们目前智能驾驶应用的现状。

可以看到,从美国加州车辆管理局2015—2022年间他们的自动驾驶汽车示范运营的情况来看,报告的自动驾驶测试事故达543起,车子不多、事故不少。另外看看国内,我们几个主要的地区,北京、上海、广州基本上各个自动驾驶企业的自动驾驶系统平均安全接管的里程大概都是在百公里3.5次,多的要到10次,就是说,基本上每过十几公里或者几十公里就得接管一次。从这两个数据看,我们可以知道的是,自动驾驶落地道路还很漫长。
我们自动驾驶到底面临着什么样的问题?主要是这个方面。
首先,安全性不足。自动驾驶汽车在做路测的时候,很可能漏检了横穿的行人,安全员接管。
第二,缺少应变。碰到违章停车的情况,结果自动驾驶汽车不会了,没有办法自行变道超越,也必须进行接管。
第三,规则感差。会自己超车了,但是越过了双黄线。
第四,变互低能。遇到了无红绿灯的行人密集的路口,可以看到车子也不会了,无法实现与其他交通参与者的博弈,一直在那儿等待,也就是“傻”在那儿了。
所以,智能驾驶汽车真正落地,还需要去解决可用性问题,虽然我们研发了这么多的自动驾驶汽车,但是实际不可用,到真实的道路场景下就不行了。
从自动驾驶本身系统来看,它的功能极其复杂,面临的环境也极其复杂,同时由于功能复杂、环境复杂,所以这个系统设计得极为复杂。我们说智能驾驶是个极端复杂性的系统,同时它的需求又是多元的、复合的,有可靠性、安全性、舒适性、智能性、交通和谐性的需求等等。在我们的系统和需求之间,必须要通过测试评价作为纽带把它们连接起来。

从另外一个侧面大家可以想象到,智能驾驶系统开发得好不好,其实很重要的点,就是它的测试工具行不行、它的评价指标好不好。所以说,完善的测试与评价体系是连接智能驾驶技术与需求的纽带,也是智能驾驶研发过程中所必须要解决的关键问题。
但是,现在我们的智能驾驶汽车测试评价是怎样的?
我们目前对自动驾驶的测评基本上沿用辅助驾驶的测试手段,汽车可能以某一个特定的车速,比如50公里/小时、60公里/小时的定速,特定的时间,给出一个假人或者假车作为交通参与者突然出现,测试它的反应。
这种测试的场景是非常简单的,范围是非常局部的,而且是孤立场景,这个工况已没办法满足我们现在非常多的企业开发的L2+的辅助驾驶、甚至L3级别自动驾驶连续性的设计运行范围(ODD)的需求。
同时智能驾驶是简单的二元评价,通过或者不通过,没有办法去综合反映智能驾驶的性能水平。
最后,测试和评价实际是割裂的,没有办法系统、完整地去测评功能实现情况。所以我们认为,应该以智能驾驶系统的可用性为出发点建立一个系统、完整、进阶式的测评体系,这个是未来自动驾驶系统或者智能驾驶系统研发必须要解决的问题。
所以,我们提出智能驾驶汽车需要对它的可用性进行测试评价,不是说简单的通过与不通过。
2
智能驾驶汽车可用性测试评价
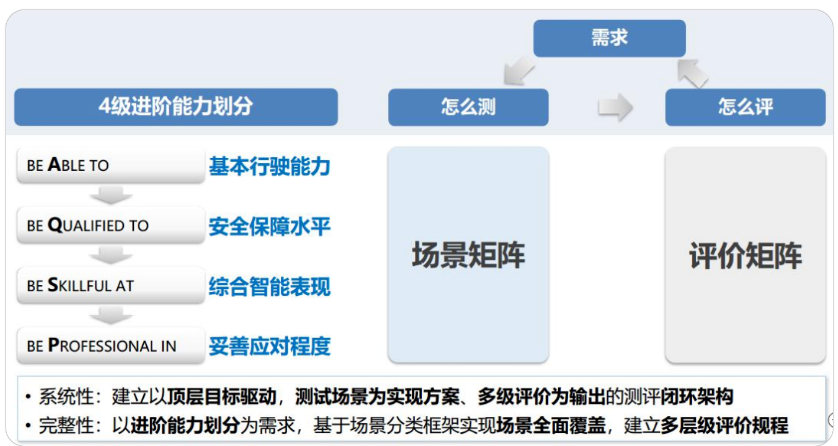
可用性,在这里我们可以用四个层面或者四个阶段进行能力划分:首先,必须能够实现基本的行驶能力;其次,能够达到我们的安全保障水平,就是达到一定的功能;再次,必须要有很好的智能性;最后,面向一些特定的场景或者工况,必须能够妥善去应对。
从这四个层级来看,我们需要去解决:一是解决怎么测的问题,就是我们得有场景的矩阵。二是解决怎么评的问题,就是我们的评价矩阵。
针对这四个层级,我下面展开讲一下。
我们从这四个层级来看:第一个,基本行驶能力,就是我们的功能层,就是自动驾驶汽车必须满足基本的功能。第二个,安全保障水平,必须得达成一定的性能。第三个,综合智能表现,也就是它必须得有足够的智能。第四个,要实现类人的智能,达到人类的水平。
简单解释一下基本的行驶能力:一是能变道,不管是HWP、或者NOA、AVP必须具备这个功能,我们对L2、L3都要做统一的测试。同样,对安全保障水平性能层面,比如需要在动态的环境下变道,这是性能层面的。再进一步,足够智能,是否能在动态环境下选择最佳的时机变道?这是考验它是否足够智能的。最后一个,如果作为人类的老司机,必须得对一些突发的情况进行处理,比如说变道过程中突然爆胎了怎么处理。
所以,我们提出需要从这四个层面逐级去递进对智能驾驶汽车进行测试和评价,不管对哪种功能,不同企业的自动驾驶功能,都是必须要满足的。如果满足了,我们就可以实现连续的、可以普适于各种各样不同的自动驾驶功能的测试场景矩阵。这个可以去列出我们整个场景矩阵的内涵,基本功能层面的、性能层面的、智能层面的、内容智能层面的。
在基本行驶能力层面,我们需要建立基本的行驶能力,HWP的场景、NOA的场景、AVP的场景,需要满足交通法规的符合性,列出了19类的交通法规的符合性,建立基本行驶能力的场景库。
在性能层面,必须得考虑ODD(设计运行范围),不同的功能有不同的ODD,ODD内的各种复杂环境行驶需要满足什么。同时,我们的车辆必须得具备识别ODD边界的能力,区域范围识别、天气条件识别、自身状态识别等等,这都是自动驾驶汽车在性能层面需要去测试和评价的一些内涵,即我们的场景内涵。
接下来在智能层面,我们前面功能也好、性能也好,更多的是立足于单车的,性能层面,除了单车的自动驾驶能力之外,必须考虑到我们的车辆对于整个交通系统的影响,所以这个层面我们的价值不断增多,而且场景交互会增高,所以这里面我们必须考虑,整个交通系统是不是符合通常人类驾驶员操作。我们还要考虑到别人的效率,不仅仅是考虑自己的效率,人具有社会性,自动驾驶汽车必须有社会性,具有交通的协调性、和谐性,我们需要构建复杂的混杂交通场景去测试。
在内容智能这块,比如智车故障、智车事故、交通检查等等,碰到这些情况下怎么去妥善应对,这是最后一个层级的场景。
接下来是评价矩阵层面的。基本的行驶能力,我们可以是通过和不通过的二元评价,但是到安全保障水平方面,我们需要对场景的条件和安全性水平两方面进行评估,然后才能给出一个安全保障水平的评分。在综合智能表现方面,我们必须要从单车的行驶到微观的交互、到中观的交通,就是不仅自己开的好,也要保障整个交通能够顺畅地通行,所以是一个综合的评估。最后,为妥善应对层面,我们需要有一个最小风险达成程度的评价。
所以,这个评价层面我们可以用这样一个SLAM串起来,尤其要强调第三层面的综合评估。我们前期也发布了一些团体标准,在上海我们率先发布国内针对自动驾驶汽车交通的和谐性或者交通的协调性的地方标准,就是要考察自动驾驶汽车,不仅要自己开得好,而且得让别人也开得好,所以这个评价矩阵是一个多维的。
最后介绍一下,我们同济大学和上汽集团共建了智能网联的测试试验场,在里面做智能驾驶的综合测试评价系统,我们希望将来的运营场景是从孤立到连续、交通参与者是从单一到混杂、评价方法是从一维到多维、整个自主区域是从局部到整体,我们要构建综合的智能网联汽车、智能驾驶汽车的测试评价体系。
这是我们总体的测试网里智能网联汽车测试场的图,接下来我们会设置连续的交通场景,设置各种各样混杂的交通参与者,去真正实现在真实的条件下、真实的环境下,或者接近于真实的条件和环境下,对智能网联汽车、自动驾驶进行测试与评价。
最后总结一下,我们认为智能网联汽车研发中,测试和评价是其中的瓶颈问题,也是关键问题。在这里我们需要把传统的ADAS测评进行彻底颠覆,要把评价体系从一维变成多维评价,把测试系统变成一个综合交通场景里面的测试系统。



 正在加载...
正在加载...