 切换行业
切换行业

也就是说,这几年国内非常火热的自动驾驶创业潮,已经迎来了第一波大规模量产,各家创业公司也到了交作业的时候了。
昨天,自动驾驶初创企业 Nullmax 纽劢 (mài 科技就发布了国内首个系统化自动驾驶解决方案 MAX 1.0。
简单介绍一下这家公司,Nullmax 成立于 2016 年,两名创始人均来自特斯拉 Autopilot 核心团队。
CEO 徐雷曾担任特斯拉自动驾驶高级计算机视觉工程师,是 Autopilot 团队核心成员,同时也是 TeslaVision 深度学习负责人。在特斯拉任职期间,徐雷根据车辆自动驾驶需求,从零开始领导搭建了 TeslaVision 的深度学习网络。
COO 宋新雨担任特斯拉供应链及产品高级经理,是 Autopilot 和娱乐系统项目开发团队的骨干成员,参与了 Autopilot 1.0 和 2.0 的产品化全过程,并负责了 Model S/X/3 产品的前期供应商开发、采购、制造以及测试、品质和可靠性的整套系统规划和执行。2017 年,Nullmax 在上海设立了总部,目前规模 150 人左右。
不难看出,Nullmax 是一家特斯拉背景浓重的自动驾驶初创企业。从之后的产品介绍以及功能规划,也印证了这个观点。
聊聊 MAX 1.0 系统。
从硬件方案来看,MAX 1.0 全车搭载了 12 个摄像头(前置三目)、5 个毫米波雷达、12 个超声波雷达,以及 DMS 和 GPS+IMU,核心计算硬件则是英伟达自动驾驶 Xavier 平台。
根据徐雷的介绍,MAX 系统实现了不依赖高精度地图、不依赖激光雷达,并且符合全车规的标准。这也和 Elon Musk 对自动驾驶的认知一致。
而在功能层面,MAX 1.0 主要能针对三大场景规划功能,分别是高速代驾(HWP)、拥堵跟车(TJP)、自主泊车(AVP)。
具体展开来讲,高速代驾功能主要针对高速和城市环路等结构化路段,主要能实现自适应巡航(ACC)、自动紧急制动(AEB)、车道居中控制(LCC)、自动变道(ALC)、自动超车(AO)以及自动上下匝道(On/Off-ramp)。
拥堵跟车功能主要应对拥堵、低速缓行路段,能够实现多档位近距离跟车、智能调整车距及速度、智能平稳启停以及精准加减速。
自主泊车能实现自主接驾、实时找车位、智能避障等功能。根据现场展示的视频来看,这套系统能够做到停车误差在 5cm 以内,角度不超过 1°。
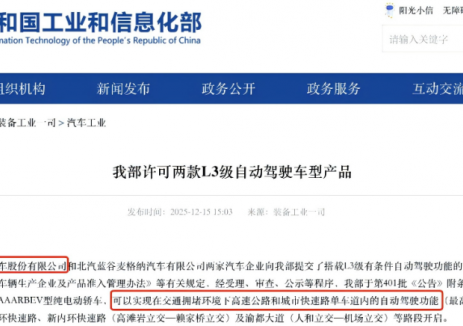
由于团队创始人的特斯拉背景,我们很容易就会把 MAX 系统和特斯拉的 Autopilot 系统进行比较。Nullmax 的工程师告诉我,相比较特斯拉的产品,Nullmax 的系统更符合中国的驾驶环境。举个最简单的例子,在上下匝道的时候,Nullmax 就会根据一般用户的驾驶习惯,把速度限制在 40km/h。
我们也都知道,自动驾驶系统作为和驾驶强相关的产品,必须在系统的稳定性上有非常高的保障。毕竟任何可能出现的误差,最终都可能导致危险发生。
为了保障系统的稳定安全,Nullmax 在设计整个运行逻辑时,加入了 ODD 的理念。
简单来说,ODD(设计运行域)表示的是自动驾驶系统可以正常作用的条件和适用范围,对驾驶的环境条件、障碍物条件、地方规范提出限制。
与之紧密相关的还有 OEDR(目标和事件监测及响应),即通过监测和分析来判断是否满足自动驾驶条件并做出响应。当遇到超出 ODD 和触发 OEDR 的情况时,自动驾驶系统会提醒用户接管并进入最小风险状态。
在软件层面,Nullmax 选择了更稳定可靠的 QNX 实时操作系统进行开发,关键技术都是自主研发。徐雷还透露,MAX 在硬件层面也同时配备了两套计算平台,从而保证系统运行时的稳定。
谈自动驾驶,离不开的还是量产。Nullmax 的 MAX1.0 计划在今年以及明年进行量产定点,2021 年实现 SOP,同时开始进行 OTA 从而实现产品优化。在今年下半年,Nullmax 还会发布 L4 相关的 RoboTaxi 的相关信息。
不难看出,Nullmax 在技术层面有着非常清晰的规划,并且也考虑到了成本、体验、安全等多方面的因素。
当然,把一套自动驾驶系统从 demo 变成量产产品,Nullmax 还需要进行的大量的测试、验证、迭代以及迭代。特别是要做出一套符合中国复杂道路情况的自动驾驶系统,要面对的挑战真的不少。




 正在加载...
正在加载...
